Poggy
Autonomous Underwater Vehicle
Unique mobility features for surveying and monitoring


Unique mobility features for surveying and monitoring
Poggy AUV
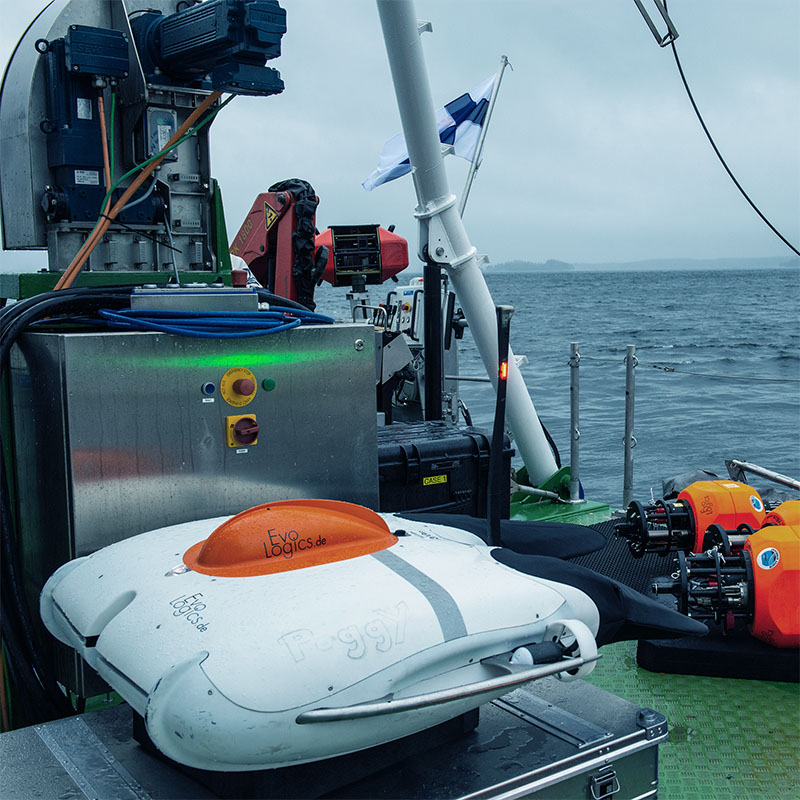
● EvoLogics’ Poggy AUV is a cutting-edge autonomous underwater vehicle designed for advanced surveying, marine exploration and monitoring.
Inspired by nature, Poggy’s innovative bionic design leverages Fin-Ray® technology to deliver unmatched mobility and control in underwater environments.
Poggy AUV

Bionic Fin-Ray® Tails
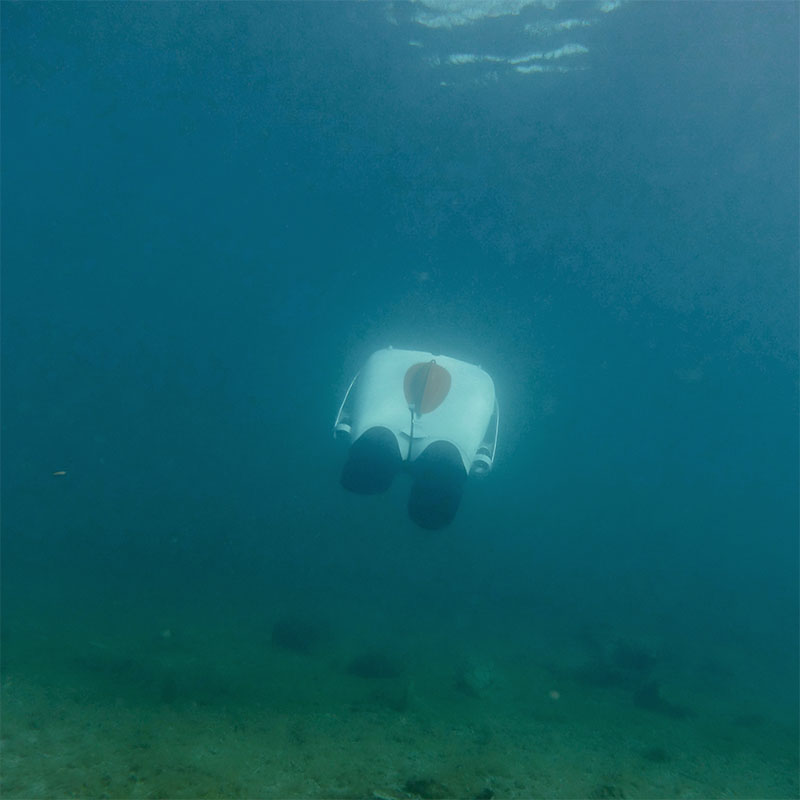
Poggy features two independently driven flexible tails based on Fin-Ray® technology. These tails allow for precise heave, pitch, and roll adjustments, supporting dynamic maneuvers including vertical climbs, dives, and leveled gliding.
Propulsion and Hovering
A robust twin-thruster setup provides agile propulsion and supports stability even during complex maneuvers. Three vertical thrusters provide full hovering capability, allowing the vehicle to hold position precisely during inspections, data collection, or low-speed operations.

Unmatched Stability and Control
Poggy maintains excellent roll and depth stability - even at low speeds - making it ideal for applications requiring detailed spatial resolution, such as point cloud surveys of complex underwater structures.
Compact Design, Large Payload
Despite its compact form, Poggy supports a generous payload capacity and carries multiple sensors, enabling multi-modal data collection in a single mission.
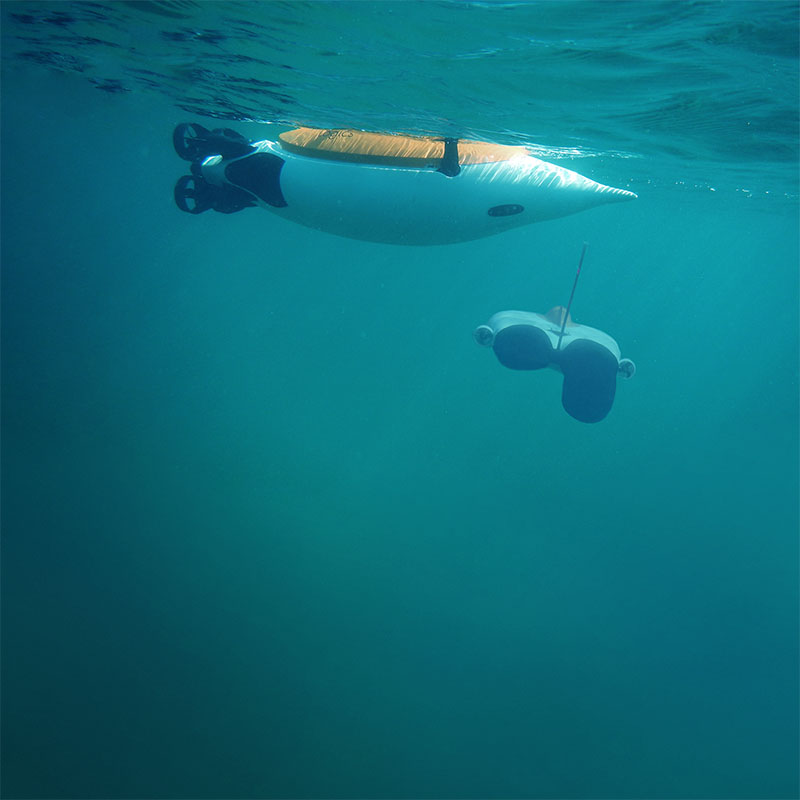
Mobile navigation and communication hub
Besides collecting survey data, Poggy can act as a mobile surface gateway, linking underwater assets to topside control over its integrated acoustic and radio communication systems. Replacing stationary surface nodes, Poggy can follow diver groups or track AUVs, simplifying coordination, reducing deployment time, and expanding mission coverage.
Poggy AUV
With the ability to carry multiple instruments simultaneously, Poggy delivers comprehensive survey capabilities without compromising agility or endurance.
Poggy’s configuration integrates diverse instruments to suit various missions, including:
Side-Scan and Forward-Looking Multibeam Sonars
For seabed and infrastructure imaging and smart collision avoidance in complex underwater environments.

AI-Based Object Recognition and Collision Avoidance
Real-time onboard intelligence identifies objects of interest and enables responsive obstacle avoidance to enhance mission autonomy and safety.

High-Definition Camera and Powerful Lights
Provide detailed visual documentation for inspections, habitat studies, and structure analysis.

Underwater Communication and Navigation System
Advanced acoustic modem with a USBL antenna for accurate positioning and reliable data transfers during operations.

GNSS and Radio Communication System
Connected at the surface: GNSS for accurate positioning and a collapsible antenna for WiFi or cell data transfers to the control center.

Environmental Monitoring Sensors - optional add-on
Payload bay capacity for additional sensors to collect water quality data for ecological and research applications, including temperature, salinity, turbidity, and other critical parameters.

Custom Payloads
Payload bay capacity for custom integration of additional sensors for specialized tasks in research, offshore energy, defense, and beyond.

Poggy AUV
Though not resembling a real animal at glance, Poggy’s design stems from bionic research and is based on the Fin-Ray® effect, derived from the physiology of fish fins.

Fish fins exhibit counterintuitive behavior under lateral pressure. When a force is applied—for example, by pressing a trout's tailfin with a finger—the fin does not bend away from the force as expected, but instead moves toward the finger, against the direction of the applied pressure.
In 1997, Leif Kniese, now Robotics R&D Lead at EvoLogics, investigated this phenomenon while studying fish tailfin mechanics. Leif discovered that the bending towards pressure phenomenon, later patented and registered under the Fin Ray® effect, is explained by the structure of the tailfin - two skeletal elements connected by elastic tissue. Leif translated this into a simplified mechanical analog. The structure he came up with behaves exactly like the tailfin of a fish: a triangular frame with crossbeams linking the sides, with a wider base that tapers to a narrow tip. Under load, the structure bends its tip against the direction of the force, replicating the biological response.
The Fin Ray® effect has been explored for various practical applications and has found particular use in the development of flexible, adaptive robotic grippers.
At EvoLogics, the Fin Ray® principle has been brought to life in several underwater robotic designs, the Manta Ray AUV standing out as a flagship example. Developed as part of the BOSS collaborative R&D project, these biomimetic autonomous underwater vehicles were designed and tested as sensor carriers for automated subsea monitoring. The wings and tail of Manta Ray AUVs use Fin Ray® structures as their internal framework, allowing them to move with smooth, lifelike flapping motions inspired by real marine animals.
Poggy’s unique design is the direct evolution of the Manta Ray. To streamline the construction and optimize performance, wings were replaced with larger thrusters. The tailfin was rearranged into two separate Fin Ray® tails with independent control, enabling precise roll adjustments. This created room for a larger collapsible antenna for near-surface communication.
Together with the rigid part of the body, the progressively bendable tails perform as two adjustable hydroplanes that in every steering position have an overall streamlined shape. This novel concept facilitates outstanding roll and depth control combined with low drag performance.
Both parts of the dual-tail use independent bionic Fin-Ray® drives and allow for precise heave, pitch and roll adjustments, enabling dynamic climbs and dives, leveled gliding and bottom following.
The first Poggy prototypes were developed under the BONUS SEAMOUNT collaborative R&D project and debuted in 2019. Since then, the vehicle has undergone significant improvements in mechanical design and sensor integration, evolving into a market-ready platform.