Research & Science Project
MagnetoBot


Status
Project Partner


Unexploded ordnance from two World Wars and other military activities can be found in almost all German waters. In the North and Baltic Seas alone, over 1.6 million tonnes are a growing problem due to advanced corrosion.
Before offshore construction of pipelines, power lines or wind farms, munition detection surveys were carried out with large magnetometer platforms, towed 2-3 m above the seafloor and able to detect objects starting at 100 kg. Risks imposed by smaller ammunition are accepted due to a lack of alternatives.
There is no systematic probing in inland waters. Local manual surveys with smaller probe arrays (e.g., at construction sites) can also detect only large-caliber objects, since due to inaccurate level maintenance the distance to the bottom is large.
The innovative MagnetoBot system aims to close this technological gap, for the first time enabling a systematic, comprehensive ordnance detection with the highest possible security for the operating personnel.
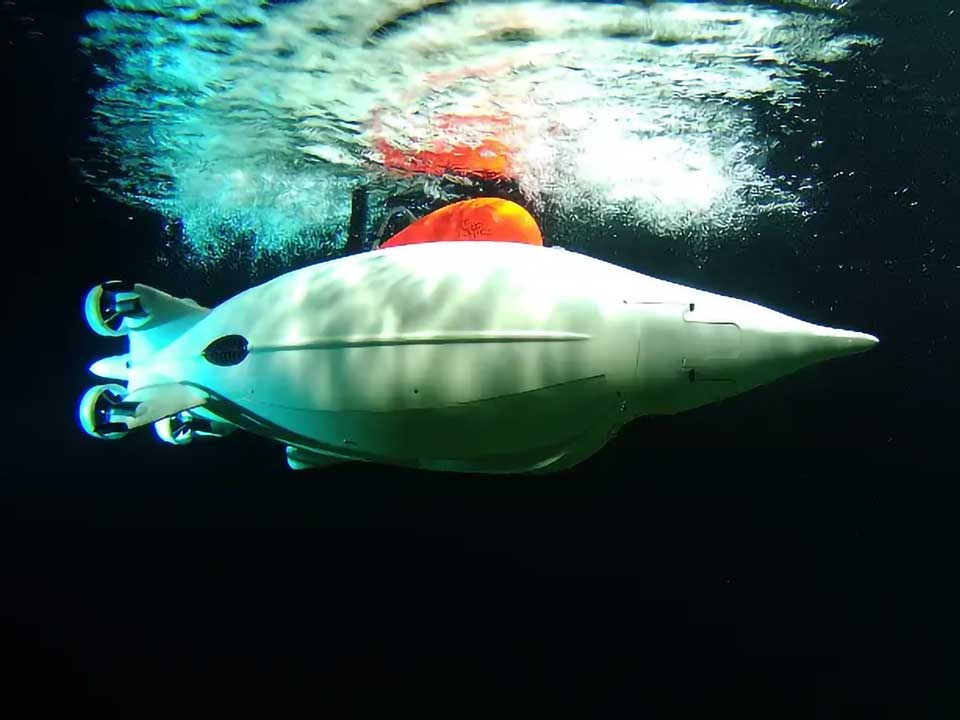
Developed within the project framework, MagnetoBot is an autonomous, actively guided magnetic field probe for ordnance detection in inland waters, harbors and coastal areas.
Magnetic-free propulsion drives, special electronics and shielding push the MagnetoBot’s electric and magnetic emissions under the ambient noise levels, whilst its bionic underwater positioning system allows centimeter-accurate 3D navigation close to the seafloor.
In conjunction with Sonobot, the EvoLogics autonomous surface vehicle, even shallow or hard-to-access waters can be inspected fully automatically with a dense survey grid, reliably detecting small ferromagnetic objects <100 g.
Research & Science
News & Events
Contact
We’d love to hear from you! Whether you have questions, feedback, or just want to say hello, reach out to us.
All information you provide us is treated with strict confidence and stored only in relation to your request.







.jpeg)


