Quadroin AUV
Key Features

High-precision surveying
The Quadroin is equipped with a side-scan sonar and a downward-looking full-HD camera, combined with AI-based object recognition for detailed subsea imaging and detection of assets in side-scan and video feeds. To collect data, the vehicle runs in supervised autonomy mode along a pre-programmed grid covering the area to be surveyed.

Mission Awareness and Control
The vehicle remains connected - both above and beneath the surface, providing operators with comprehensive awareness and control through all stages of the mission. Before the dive, the vehicle’s collapsible multi-antenna receives GNSS fixes and establishes wireless links to the control station. During the mission, an acoustic connection to a surface gateway - a stationary USBL Buoy, a mobile Sonobot 5 USV or a USBL-equipped vessel - provides GNSS locks with acoustic positioning fixes and relays the vehicle status to shore. Through the acoustic link, operators can adjust waypoints, upload modified mission parameters, interrupt or abort the mission, and initiate automated recovery procedures. After resurfacing, all collected data is available for wireless download and post-mission analysis.

Advanced navigation with live status updates
Carrying an acoustic modem, the vehicle combines inertial dead-reckoning navigation with intermittent USBL/LBL positioning fixes for periodical GNSS locks from surface gateways. During the mission, trajectory and status updates are available at the operator’s station through a wireless link to the gateway.
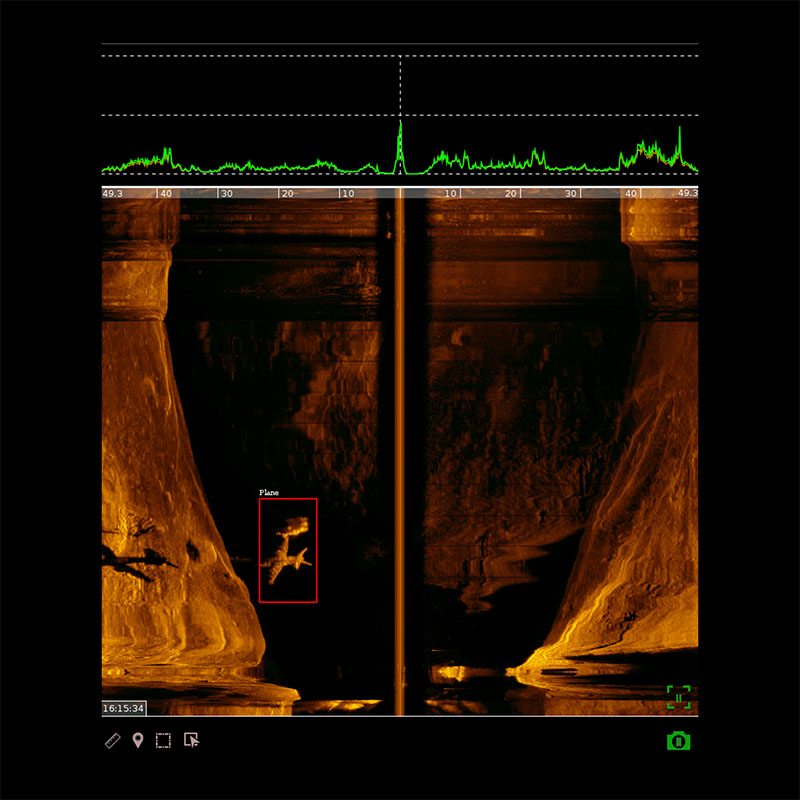
AI-powered onboard processing
Runs directly on the vehicle, analyzing side-scan sonar and video camera feeds to detect various object classes in real time during the mission. Through the acoustic link, detection type and location are transmitted to the control station for immediate evaluation, with all detections included in the full dataset for detailed post-mission analysis.
Cooperative multi-vehicle networks
The Quadroin can be configured to operate as part of joint multi-vehicle missions - coordinated Quadroins AUVs, Sonobot USVs, and EvoLogics Diver Navigation System units networked with surface gateways into a hybrid robot/diver taskforce. With Quadroin’s updates on detected objects, divers can be directed towards the discoveries for on-site assessment, enabling efficient, time-saving inspections.

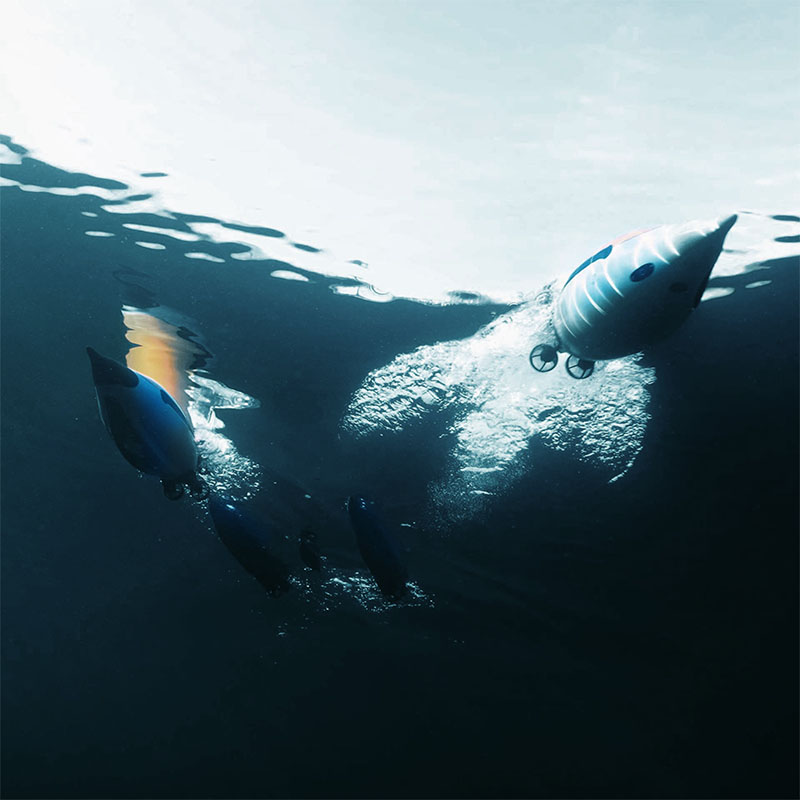
High-speed performance and efficient operation
The Quadroin’s penguin-inspired spindle-shaped hull minimizes drag and maximizes efficiency. The vehicle reaches speeds of up to 10 knots while maintaining exceptional maneuverability and low energy consumption, making the AUV suitable for both short survey missions and longer, data-intensive deployments.

Easy to handle, easy to find
Lightweight and compact, the Quadroin can be carried by a single person, transported in a car trunk, and launched quickly in the field - from vessels or platforms of any size. Before or after the mission, the vehicle can be manually steered with a remote control to reach the start or recovery point. Once resurfaced, the AUV is clearly visible over water thanks to bright LEDs and flashing lights, so its recovery is straightforward.










